El Grupo de Visión Artificial de la Universidad de Santiago de Compostela (USC), centrado en los campos de la Electrónica y del Procesamiento de Imágenes, está avanzando en el desarrollo de un sistema de identificación de personas a través de la imagen de la retina. Colaboran en este proyecto con investigadores del Grupo de Visión Artificial y Reconocimiento de Patrones de la Universidad de A Coruña, más orientado al ámbito computacional.
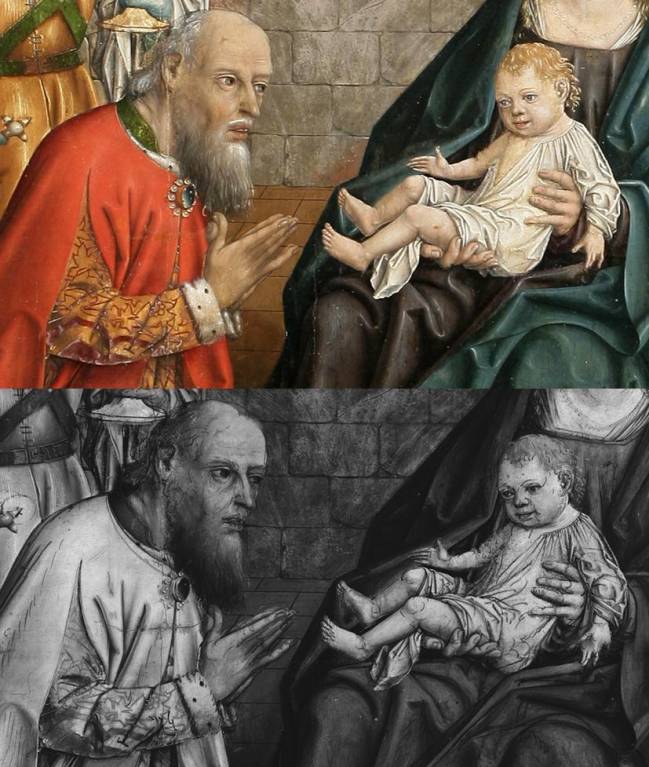
Investigadores de la Universidad Politécnica de Madrid han desarrollado un sistema que obtiene, de manera automática, imágenes del dibujo subyacente de una obra pictórica mediante la creación de mosaicos reflectográficos para su uso en tareas de análisis y conservación.

VARIM: Nuevo sistema para extraer imágenes subyacentes de obras pictóricas
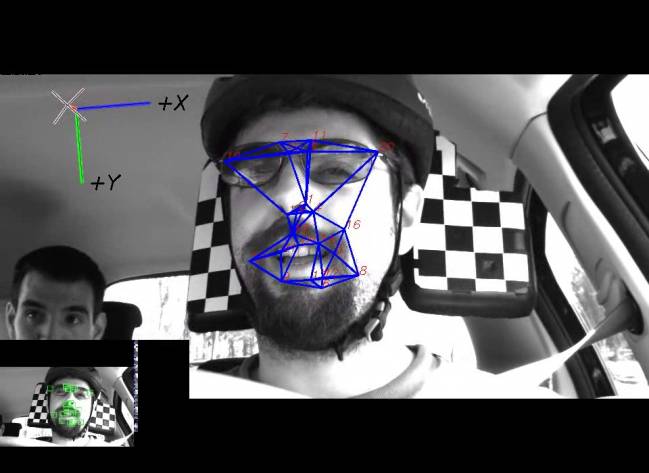
Investigadores de la Universidad de Alcalá (UAH) desarrollan un sistema de visión artificial capaz de reconocer la orientación de una cara sin necesidad de identificación ni entrenamientos previos.

La robótica industrial ha sufrido un gran desarrollo tecnológico desde que en 1961 la firma General Motors utilizara el primer robot para trabajos de soldadura. Desde entonces, ha cambiado desde su estructura física hasta la integración de sensores, su capacidad de diálogo con las máquinas que le rodean o su capacidad de carga, con robots que pueden llegar a manipular hasta 500 kilos. El principal reto al que se enfrenta ahora la robótica industrial pasa por el desarrollo e integración de sensores capaces de procesar mayor cantidad de información, sobre todo de dos tipos: visión artificial y sensores de fuerza.

