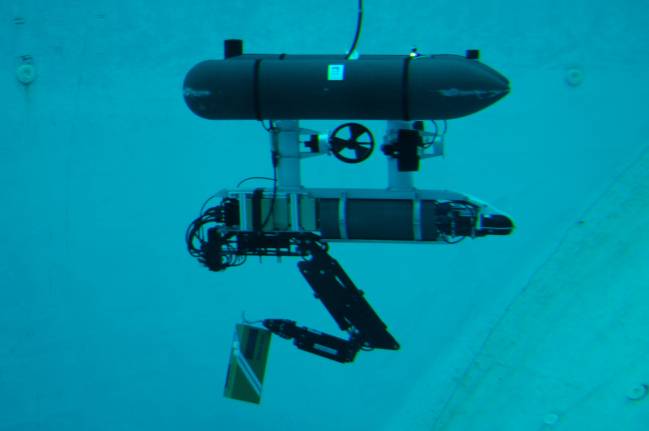
Los investigadores e investigadoras del proyecto nacional RAUVI: AUV Reconfigurable para intervención, coordinado por Pedro Sanz, profesor de Ciencia de la Computación e Inteligencia Artificial de la UJI, han probado satisfactoriamente la autonomía del robot para tareas de intervención submarinas, consiguiendo la recuperación de un objeto similar a la caja negra de una aeronave sin la dirección de ningún operario.