Se cumplen treinta años del estreno de Blade Runner.
El proyecto LIFE+ INDEMARES ha permitido filmar por primera vez algunos de los ecosistemas más singulares y desconocidos de las aguas españolas. Con motivo del Día Mundial de los Océanos, el Instituto Español de Oceanografía (IEO) muestra las imágenes de las últimas campañas realizadas en los volcanes de fango del golfo de Cádiz y el conjunto de cañones de Avilés.
Investigadores de la Universidad de Málaga han creado un sistema para seguir el comportamiento de los habitantes de un domicilio mediante sensores inalámbricos, de tal forma que se facilita su movilidad y se pueden generar alertas. A la red de sensores también han incorporado una silla de ruedas con navegador y un asistente robótico para buscar objetos.
El centro de investigación Tecnalia Research & Innovation va a incorporar en la industria europea a Hiro, el secreto mejor guardado de la robótica japonesa. Se trata del primer robot humanoide que trabaja codo a codo con las personas, en lugar de en recintos separados, con el objetivo de mejorar la seguridad, capacidad y competitividad de las fábricas.
Investigadores de la Universidad Politécnica de Madrid (UPM) han desarrollado BaTboT, el primer prototipo de robot aéreo inspirado en la forma y el vuelo de los murciélagos. La pequeña nave, que cambia la morfología de sus alas en pleno vuelo, podría ser la base para el desarrollo de una nueva generación de micro vehículos aéreos.
Un grupo de investigación del Instituto Andaluz de Automática Avanzada y Robótica (IAR) ha desarrollado un robot autónomo que sirve como asistente en cirugías mínimamente invasivas. El autómata, bautizado como CISOBOT, no necesita ser manipulado por ninguna persona, sino que responde a los gestos específicos y a comandos de voz que realiza el cirujano y mediante una cámara y un brazo ayuda al especialista en procedimientos simples como suturar.
Lagartijas de cabeza roja saltando
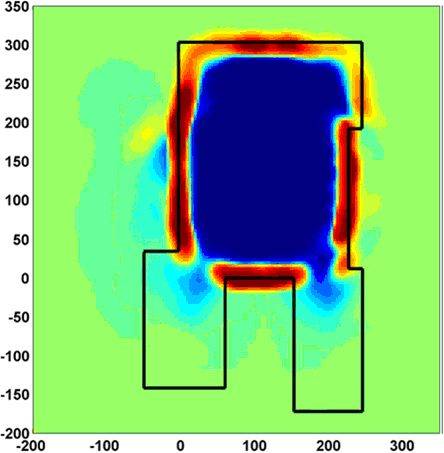
Un robot móvil autónomo es aquel que es capaz de desplazarse por su entorno sin colisionar, sin perderse y recuperándose de eventuales situaciones de desorientación. Investigadores de la Universidad Politécnica de Madrid (UPM), en colaboración con el European Centre for Soft Computing, han publicado una técnica de construcción de mapas para robots móviles basada en "antónimos" que mejora los actuales sistemas de navegación.
El test de inteligencia universal medirá la inteligencia de animales y máquinas.