Investigadores del Instituto de Tecnología de Georgia (EEUU) se han fijado en cómo las lagartijas surcan las arenas del desierto para crear un pequeño robot que haga lo mismo en superficies granulares. La máquina puede inspirar a los ingenieros para perfeccionar los vehículos de exploración planetaria.
Investigadores del Georgia Institute of Technology (EEUU) se han fijado en cómo las lagartijas surcan las arenas del desierto para crear un pequeño robot que haga lo mismo en superficies granulares. La máquina puede inspirar a los ingenieros para perfeccionar los vehículos de exploración planetaria.
Investigadores del Instituto de Tecnología de Georgia (EEUU) se han fijado en cómo las lagartijas surcan las arenas del desierto para crear un pequeño robot que haga lo mismo en superficies granulares. La máquina puede inspirar a los ingenieros para perfeccionar los vehículos de exploración planetaria.
Investigadores del Georgia Institute of Technology (EEUU) se han fijado en cómo las lagartijas surcan las arenas del desierto para crear un pequeño robot que haga lo mismo en superficies granulares. La máquina puede inspirar a los ingenieros para perfeccionar los vehículos de exploración planetaria.
Investigadores del Instituto de Tecnología de Georgia (EEUU) se han fijado en cómo las lagartijas surcan las arenas del desierto para crear un pequeño robot que haga lo mismo en superficies granulares. La máquina puede inspirar a los ingenieros para perfeccionar los vehículos de exploración planetaria.
Las veloces carreras de las lagartijas del desierto han inspirado a los científicos para crear un robot de su tamaño, según un estudio que presenta esta semana la revista Science.
Tras trabajar con alas de aeronaves en el aire y con robots submarinos en el agua, un equipo del Instituto de Tecnología de Georgia (EE UU) se ha fijado en cómo introducen sus extremidades esos reptiles en la arena para analizar el movimiento de objetos en superficies granulares, como la arena o grava.
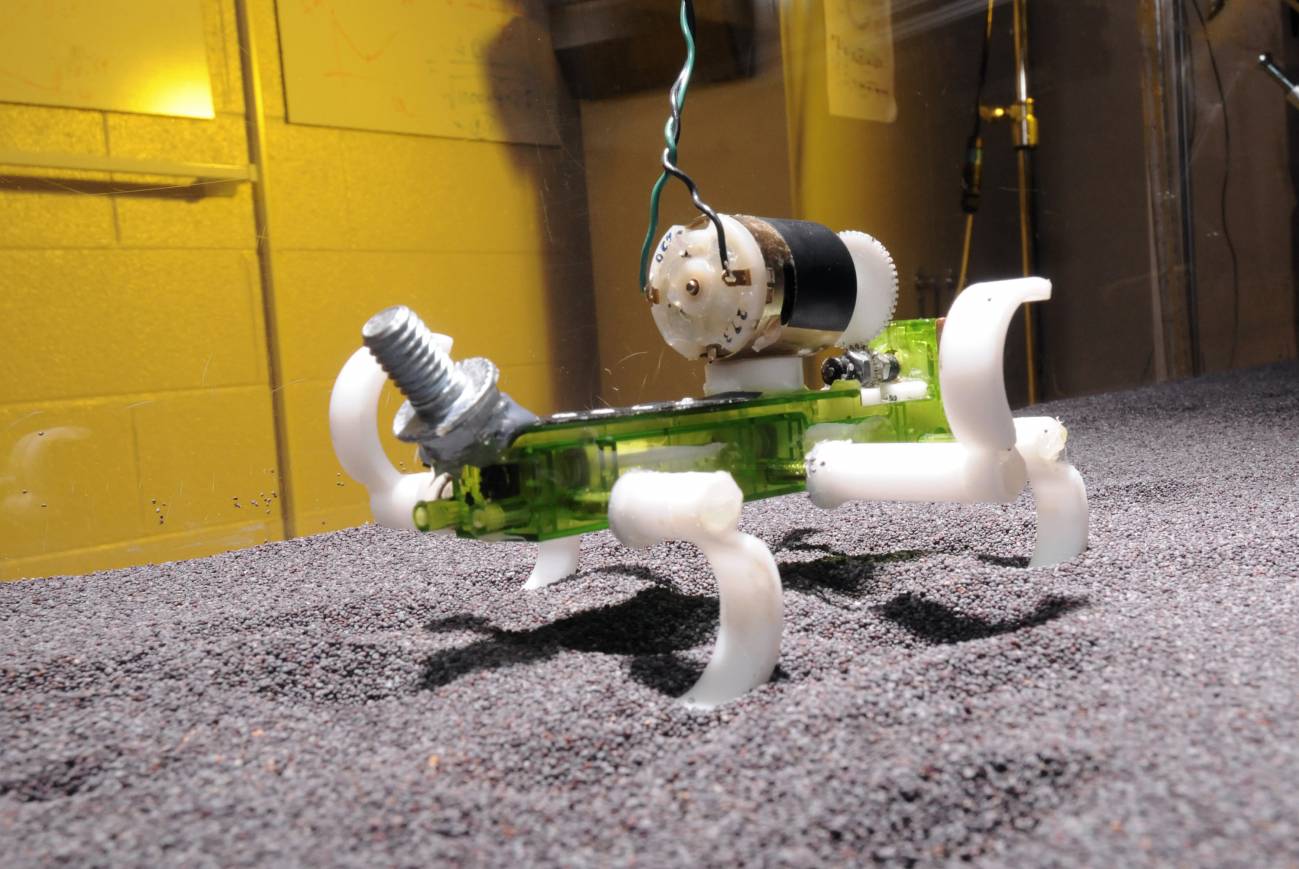
Los resultados han servido a los investigadores para diseñar un aparato robótico de seis patas que se mueve de forma rápida y eficaz por una cama de granos sueltos.
Los investigadores han comprobado que las interacciones en un terreno como este –aunque también podría ser arena, lodo o pasto–, llegan a ser más complejas que los movimientos a través de los fluidos.
Para solucionarlo, se han efectuado simulaciones computarizadas para identificar las formas de las piernas y las frecuencias de los pasos o zancadas óptimas que permiten atravesar un terreno tan deformable.
Patas en forma de C
Teniendo en cuenta las fuerzas de elevación y arrastre que afectan a cada una de las piernas robóticas, según entran y salen de las superficies granulares, los investigadores han optado por un diseño de extremidad en forma de C, ya que parece optimizar los pasos.
Este diseño todavía no es tan eficiente como el de las lagartijas y otros animales, pero podría ayudar a mejorar el rendimiento de los robots que se mueven por superficies, como los rovers que se preparan para la exploración planetaria: los futuros ‘curiosities’.
La investigación supone un avance, según sus promotores, en el campo del terradinamycs, el término con el que han bautizado a la ciencia que estudia los animales y vehículos con extremidades para desplazarse en superficies complejas como las granulares.
"Ahora tenemos las herramientas para entender el movimiento de vehículos con patas sobre la arena suelta de la misma forma que los científicos y los ingenieros han tenido herramientas para entender la aerodinámica y la hidrodinámica", comenta Daniel Goldman, uno de los autores.
Referencia bibliográfica:
Chen Li, Tingnan Zhang, Daniel I. Goldman: “A Terradynamics of Legged Locomotion on Granular Media". Melany L. Hunt: “Robotic Walking in the Real World”. Science 339, 22 de marzo de 2013.
Investigadores de Suiza han construido un dron que puede caminar, saltar y emprender el vuelo con ayuda de patas parecidas a las de una ave, lo que amplía enormemente la gama de posibles entornos accesibles a los vehículos aéreos no tripulados. El avance ayudará a la mitigación de desastres o a las entregas en áreas confinadas.
El pájaro robótico PigeonBot II, probado con éxito en un túnel de viento y de manera autónoma al aire libre, logra volar de manera similar a estas aves, sin aleta vertical. Sus aplicaciones abren el camino para diseñar aviones más eficientes en combustible.




